|
|
Denna rapportmall innefattar projekt 1 i kursen Fordonssystem (TSFS05).
Syftet med mallen är att underlätta för er när ni ska redovisa era resultat och slutsatser. Det kan vara svårt att veta vilken detaljnivå som är lagom att lägga sig på. Vi har därför tagit med ett antal exempel.
En annan stor poäng med mallen är att ni ska ha allt samlat på samma ställe. Dels blir det lättare för oss att rätta och hjälpa er om ni kör fast, men framför allt underlättar det för er själva. Det ni skriver i Kapitel 2 och som ni lämnar in som förberedelse, är det som ni kommer bygga resten av arbetet på. Kom bara ihåg att ta med er rapporten och att titta i den när ni jobbar med projektet!
Mallen innehåller redan en hel del text. Den som är skriven med vanlig rak stil är text som ni kan låta vara kvar. Text skriven med kursiverad stil som den här, ska ni däremot sudda ut eftersom den bara är tänkt som hjälp till er medan ni skriver rapporten.
Vill ni utforma er rapport på ett annat sätt än som i den här mallen eller skriva i ett annat ordbehandlingsverktyg går det givetvis bra. Det viktiga är att resultat och diskussioner för alla ingående delar redovisas tydligt.
I den här projektrapporten behandlas i första hand en turboladdad motor från SAAB. En matematisk modell för motorn tas fram och implementeras, dess modellparametrar identifieras ur mätdata, och de olika delmodellerna valideras. Till bränsleinsprutningssystemet kopplas en regulator, som använder sig av såväl framkoppling som återkoppling från den diskreta lambdagivaren. Slutligen kopplas motorn samman med ett antal färdiga moduler innehållande förarmodell, kopplingsmodell och drivlinemodell. Detta för att kunna utföra simuleringar av helfordon. En serie experiment utförs vars syfte är att studera emissionsbildning och bränsleförbrukning. Verktyget som används för implementeringen är Matlab kombinerat med Simulink.
Förutom arbetet med motormodellen behandlar rapporten en serie undersökningar, vars syfte är att illustrera hur energi lagrat i bränsle under motorns arbetscykel omvandlas till ett drivande moment, och de förluster som kan uppstå.
I Kapitel 2 delas motorn upp i delkomponenter. Varje komponents uppförande beskrivs matematiskt och experiment för att bestämma modellparametrar designas.
I Kapitel 3 redovisas och diskuteras resultatet av undersökningen om hur motorn producerar moment, dvs projekt 1B.
I Kapitel 4 redovisas och diskuteras resultaten från de experiment som beskrivs i Kapitel 2. Detta är det första kapitlet som behandlar projekt 1C.
Kapitel 5 behandlar bränsleinsprutningsregulatorn.
Kapitel 6 introducerar en longitudinell fordonsmodell.
Kapitel 7 redovisar och diskuterar resultaten av en serie experiment.
I Kapitel 8 redogörs för de slutsatser som dragits under modellbygget och simuleringsstudierna, och en sammanfattande bild av arbetet ges.
Kapitel 2 utgör förberedelseuppgiften inför projektet. Komplettera kapitlet med modellbeskrivningar och experimentplan för de komponenter som inte redan beskrivits, och lämna i facket innan utsatt tid.
Till det andra inlämningstillfället, dvs efter att ni genomfört projekt 1B, vill vi ha in Kapitel 3.
Till det tredje inlämningstillfället, dvs efter att genomfört projekt 1C, ska ni ha skrivit Kapitel 4–8. Vi vill då ha in hela rapporten. Glöm inte att bifoga Matlab-koden!
I det här kapitlet delas motorn upp i ett antal komponenter, som sedan modelleras separat. För varje komponent anges in- och utsignaler, matematisk modell som beskriver uppförandet, samt de parametrar som ska bestämmas. Därefter beskrivs hur modellparametrarna ska identifieras.
Insignaler till motorn är gaspedalposition, varvtal och bränsleinsprutningstid. Utsignaler är motormoment, faktiskt och uppmätt lambda, uppmätt luftmassflöde förbi spjället och uppmätt tryck i insugningsröret. De givare som mäter luftmassflödet och trycket i insugningsröret antas ha försumbar dynamik, medan dynamik och fördröjningar vid lambda-mätningen tas hänsyn till. Motorn delas upp i följande komponenter:
Eftersom simuleringar ska göras med både varm och kall motor, undersöks även hur lång tid det tar för katalysatorn att bli varm.
Till er hjälp finns en komplett modellbeskrivning och experimentplan för gasspjället, samt större delen av modellbeskrivningen för gaspedalen. Använd dessa som mall när ni utformar modellbeskrivning och experimentplan för övriga komponenter.
Motormodellen kan delas upp i ett antal delblock. I Figur 2.1 visas ett blockschema över motorn, där man kan se vilka delblock som ingår i modellen och respektive blocks in- och utsignaler.
|
|
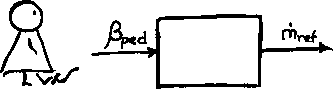
På moderna motorer anger gaspedalläget önskat referensluftmassflöde. Här
presenteras en modell för detta samband. Samma modell finns beskriven i
laborationskompendiet. I modellen kan gaspedalläget βped varieras kontinuerligt
mellan 0 och 1. Ett blockschema över gaspedalen visas i Figur 2.2.
Obs! Pedalpedalläge är inte detsamma som gasspjällvinkel.
där det maximala luftmassflödet approximeras med
Så här tänker vi bestämma det minimala luftmassflödet, som vi antar är samma som
tomgångsluftmassflödet …. Dessutom ska vi bestämma omgivningstrycket och
temperaturen i insugningssystemet.
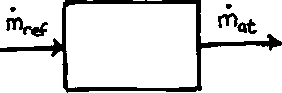
Gasspjället används för att reglera luftmassflödet så att det styrs in mot
referensvärdet ṁat,ref. Gasspjället med dess regulator är komplicerad att modellera,
och hela uppträdandet approximeras därför här med ett första ordningens system.
Ett blockschema över gasspjället visas i Figur 2.3.
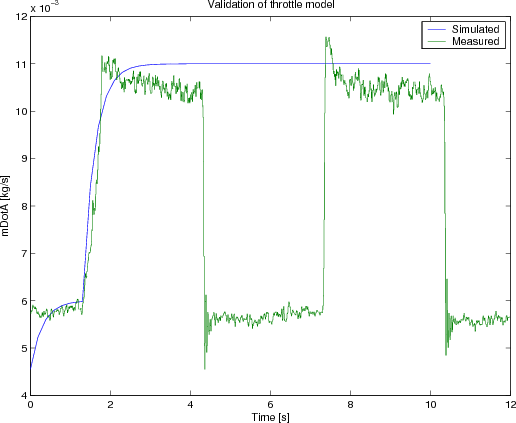
Luftmassflödet fås genom en integration:
där t0 är tidpunkten då steget sker. Vid tiden τth + t0 är
Tidskonstanten bestäms därför som tidsintervallet från tidpunkten då en
förändring först kan observeras, till dess att luftmassflödet har nått 63% av
den slutliga förändringen.
Motormoment, luft/bränsleförhållande
Tryck, lambdamätning, kallstartstid
I det här kapitlet redovisas och diskuteras resultaten från projekt 1B. Projektets
syfte är att visa hur ett drivande moment kan produceras ur kemiskt lagrad
energi, och var förluster kan uppstå. Tillvägagångssätt beskrivs genom att
använda ekvationer redovisas och namnet på de mätdata-filer som använts
anges.
Det här kapitlet lämnas in till det andra inlämningstillfället, dvs efter att projekt
1B har genomförts. Bifoga matlab-kod.
Förberedelseuppgifterna behöver inte redovisas i rapporten, men tänk på att de
kan ge värdefulla ledtrådar när ni t.ex. ska förklara figurernas utseende.
I det här kapitlet behandlas åter medelvärdesmodellen. Resultaten av
parameterskattningarna redovisas, modellerna valideras och implementeringen av
modellerna illustreras.
Projekt 1C – Dynamik och emissioner
Till motorns bränsleinsprutningssystem kopplas en bränsleregulator. I detta
kapitel redovisas design av regulatorn, hur vi gått till väga för att bestämma
regulatorparametrarna, samt figurer som visar att vi har lyckats.
Projekt 1C, fortsättning.
Motorn kopplas ihop med en longitudinell förarmodell. I det här kapitlet redovisas
dess utseende och ingående ekvationer. Ett accelerationstest genomförs, och dess
resultat rimlighetsbedöms.
Projekt 1C, fortsättning.
I det här kapitlet redovisas resultaten av ett antal experiment som anges i
laborationskompendiet. Resultaten diskuteras och rimligheten bedöms.
Projekt 1C, fortsättning.
2.2.1 Modellbeskrivning

(2.1)

(2.2) 
2.2.2 Experimentplan
2.3 Gasspjäll
2.3.1 Modellbeskrivning

(2.3)
(2.4) 2.3.2 Experimentplan

(2.5)

(2.6) 2.4 Insugningsrör
2.5 Bränsleinsprutning
2.6 Bränslepölar
2.7 Cylindern
2.8 Avgassystem med lambdagivare
Kapitel 3
Stationär analysKapitel 4
Implementering och validering av motormodell4.1 Gaspedal
4.2 Gasspjäll
4.3 Insugningsrör
4.4 Bränsleinsprutning
4.5 Bränslepölar
4.6 Cylindern
4.7 Avgassystem
Kapitel 5
RegulatorKapitel 6
Longitudinell fordonsmodellKapitel 7
Experiment7.1 Testkörning på del av körcykel
7.2 Simulering av hel körcykel
7.3 Bränsleförbrukning
7.4 Emissioner
Kapitel 8
Slutsatser